Power
Batteries
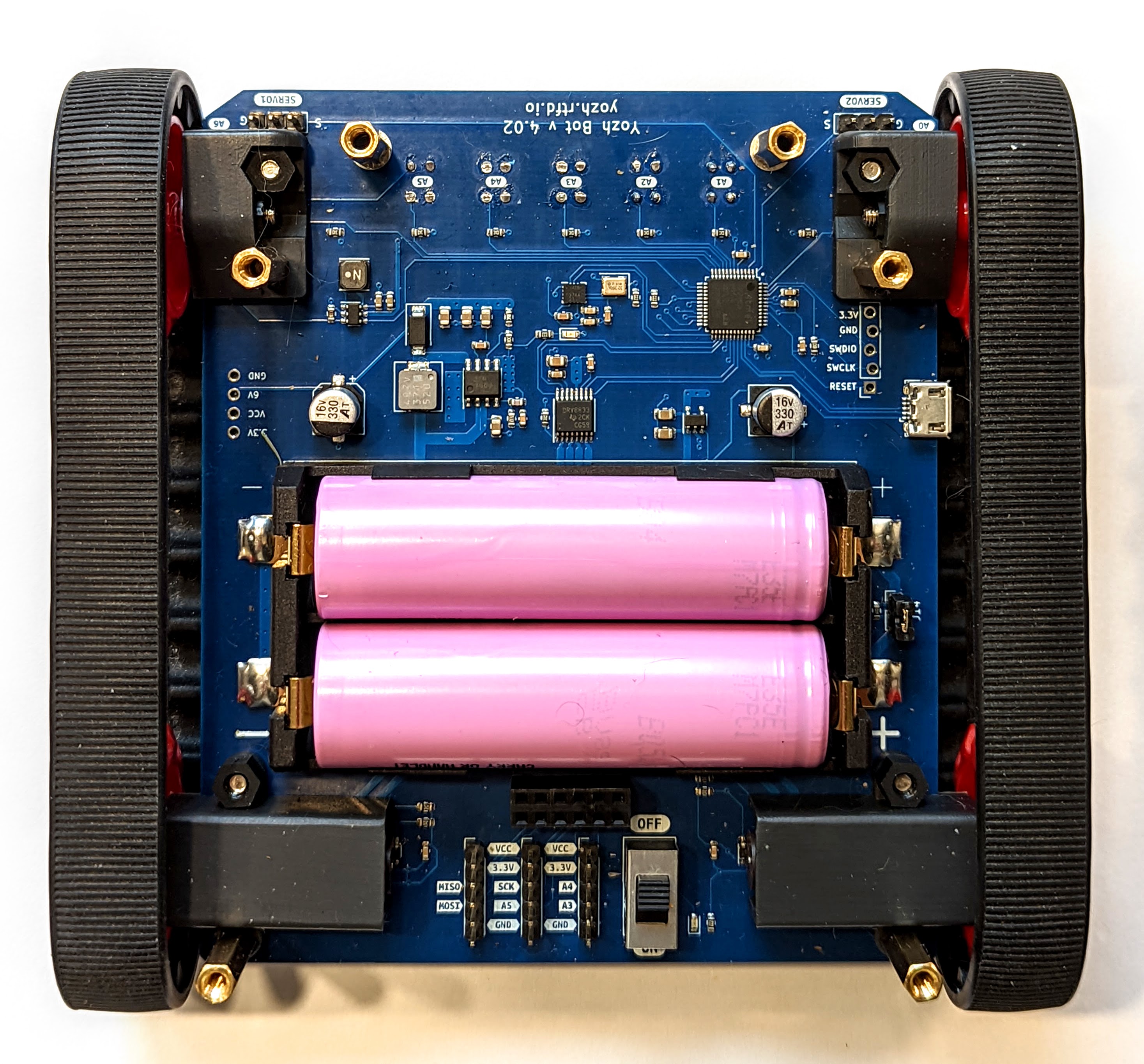
Yozh is powered by one or two 18650 Li-Ion batteries, inserted in the battery compartment inside the robot; to access it, you need to remove the top plate. See the section below for discussion of whether you need one or two batteries.
Warning: Li-Ion batteries can be dangerous if not handled right! please make sure to place them with correct polarity, and follow the instructions in the next section if you use two batteries. Always turn the power switch off before removing the top plate or doing any other work on the robot.
It is highly recommended that you use batteries from a trusted manufacturer, such as Panasonic, Samsung, or Sanyo; do not try to save a couple of dollars by buying a no-name battery from Amazon or eBay - instead, use one of specialized shops such as https://www.18650batterystore.com/. You need flat top unprotected batteries; look for batteries with capacity 3000 mAh or more. Current rating is less important (you need a battery rated for 4A continuous current or more – this is low by the standards of 18650 battery cells). A good choice is this battery: https://www.18650batterystore.com/products/samsung-35e
The robot also contains power switch, for disconnecting the battery, and a
power indicator LED.
You can check the battery voltage in software, using battery_voltage() function as
described in Yozh Library Guide. Fully charged Li-Ion batteries
should read about 4.2v.
One or two batteries?
For most purposes, one 18650 battery is sufficient. Place it in the slot closest to the back of the robot. Make sure to place it with correct polarity; positive and negative terminals are labeled on the robot PCB.
If you are planning on using accessories that might use significant current, such as large size servos or AI cameras, or if you want to run the robot for long periods, you might want to add a second battery; these two batteries will be connected in parallel.
If you want to use two batteries, please observe these precautions. Please take them seriously!
it is best to use the two identical batteries (same manufacturer and model)
before inserting the batteries, turn the power switch to off and remove the jumper J14 next to the batteries. After this, insert the batteries; make sure to place them with correct polarity as labeled on the PCB. Leave them inserted for a couple of hours or so, keeping the power switch off. After two hours, put the jumper J14 back on. (This allows the two batteries to equalize the voltage. The positive terminals are connected through on-board 1 Ohm resistor. Jumper J14 shorts it.)
Voltages used by the robot
The robot contains a voltage regulator, which converts battery voltage to regulated 3.3v. This regulator provides power to the secondary MCU, IMU and distance sensors, leaving about 300 mA available for use by extra sensors you might connect to Yozh.
Yozh also contains a boost converter, converting battery voltage to regulated 6V. This is used to power the motors and servos.
Finally, some of the on-board electronics are powered directly from the battery voltage: the main MCU and TFT screen, Neopixels and headlights.
Connecting the ESP32-S3 microcontroller to a computer by USB cable provides power to the MCU even if the main battery is off. This would activate the main MCU and some of the electronics, but not the secondary MCU, motors or servos.