Yozh Robot
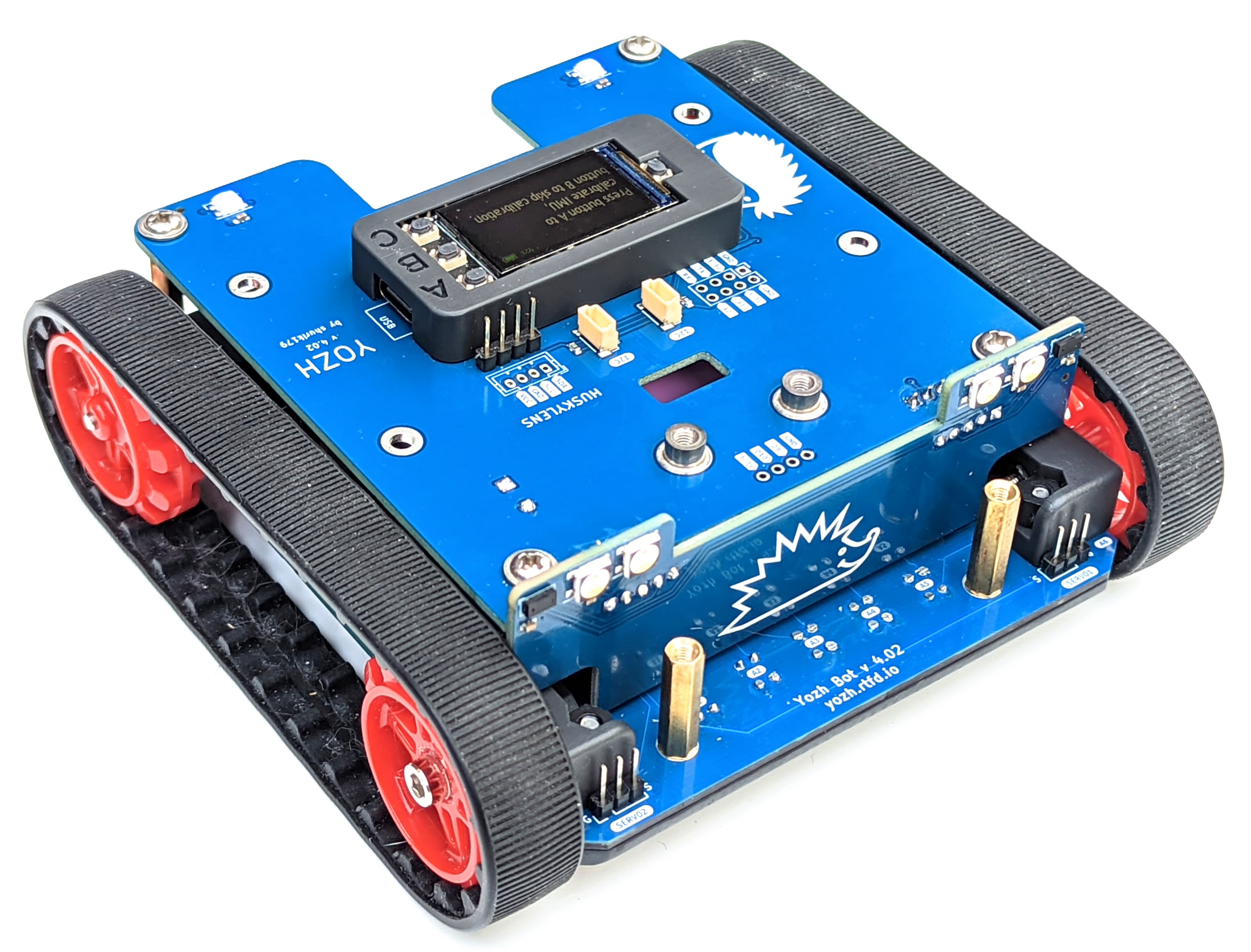
Yozh is a small (about 13cm*13cm) robot, inspired by Pololu’s Zumo robot. It was created by shurik179 for a robotics class at SigmaCamp. Below are the key features of this robot.
Dimensions: Length: 12.4 cm; width: 13 cm; height: 4.9 cm
Power: one or two 18650 Li-Ion batteries
Wheels and motors: uses silicone tracks and 6V, HP, 75 gear ratio micro metal gearmotors, both by Pololu.
Main controller: ESP32-S3 Feather board by Adafruit, which serves as robot brain. It is programmed by the user in CircuitPython, using a provided CircuitPython library. This library provides high-level commands such as move forward by 30cm
Electronics: a custom electronics board, containing a secondary MCU (SAMD21) preprogrammed with firmware, which takes care of all low-level operations such as counting encoder pulses, controlling the motors using closed-loop PID algorithm to maintain constant speed, and more.
Included sensors and other electronics
240*135 color TFT display and 3 buttons for user interaction
Bottom-facing reflectance array with 7 sensors, for line-following and other similar tasks
Two front-facing distance sensors, using VL53L0X laser time-of-flight sensors, for obstacle avoidance
A 6 DOF Inertial Motion Unit (IMU), which can be used for determining robot orientation in space for precise navigation
Two RGB LEDs for light indication and a buzzer for sound signals
Four RGBW LEDs used as headlights
Expansion ports and connections:
All robot design is open source, available in github repository under MIT License, free for use by anyone. We also plan to create a Yozh kit which would be sold on Tindie for those who want to build the robot but do not have time or skill to assemble their own PCBs.
You can view photos and videos of Yozh here:
https://photos.app.goo.gl/grQfWu86DGW8zRTT8
Table of Contents