Electronics
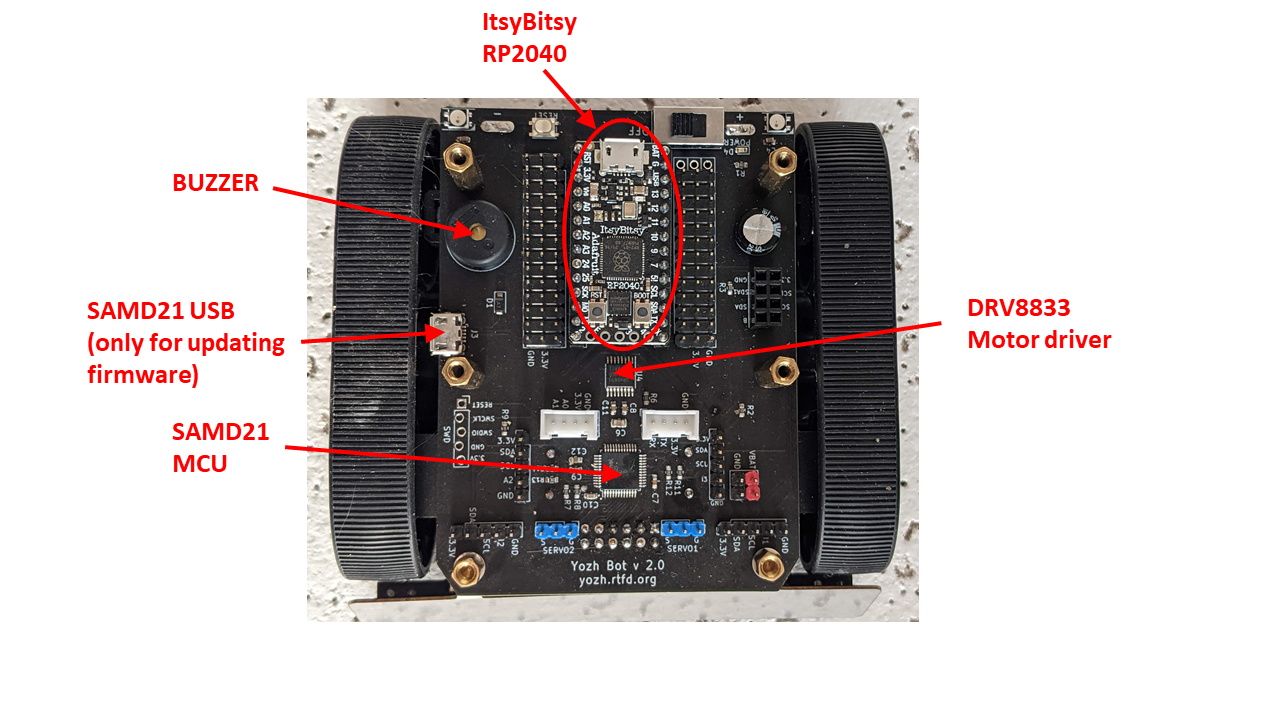
The robot is controlled by two microcontrollers (MCU):
Main (master) MCU: ItsyBitsy RP2040 This MCU is programmed by the user in CircuitPython. Provided CircuitPython library, documented in Yozh Library Guide, provides convenient functions for using all features of the robot.
Secondary (slave) MCU: SAMD21G. This MCU is responsible for all low-level operations, converting high-level commands coming from main MCU into signals sent to motors, servos, NeoPixel LEDs and more, thus freeing pins and other resources of the main MCU for other purposes. Secondary MCU is also responsible for counting the encoder pulses and running the PID control loop maintaining motor speed. This MCU comes preloaded with firmware, written in C++ (using Arduino IDE). Normally, the user shouldn’t need to touch this firmware.
The two MCUs talk to each other using I2C communication protocol; main MCU acts as the master on the I2C bus, and the secondary acts as slave.
Some of Yozh hardware is directly controlled by the main MCU, without going through the secondary one:
OLED display
Buttons
Buzzer
Distance sensors
Everything else – motors, encoders, servos, NeoPixel LEDs, reflectance sensor array, battery voltage monitoring, Inertial Motion Unit – is handled by the secondary MCU.