Maze runner: wall following
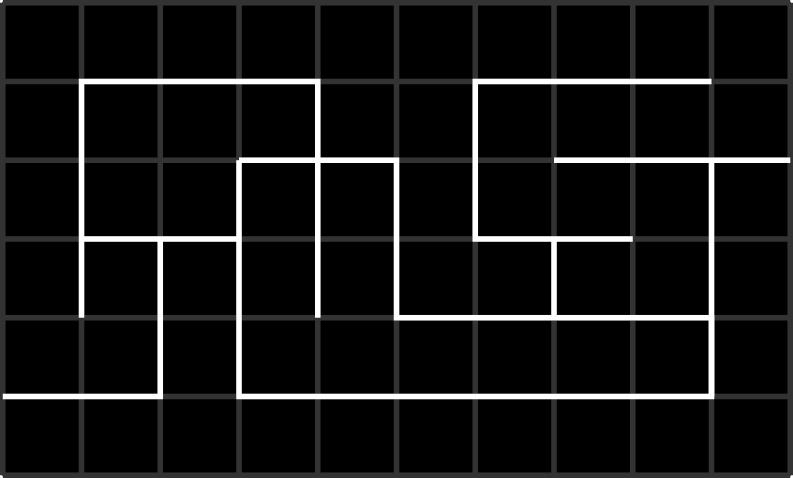
In this challenge, we will teach the robot find its way out of a maze. The maze is made of approx. 3x5 ft sheet of plywood, painted black. White masking tape (3/4 inch wide) is used to mark passages forming the maze; these lines follow rectangular grid with 0.5 ft squares.
Finding a way out of a maze is a classic problem, and there is a number of algorithms for doing that. The simplest of them is the wall following rule.
Start following passages, and whenever you reach a junction always follow the leftmost open passage. This is equivalent to a human walking in the a maze by putting his hand on the left wall and keeping it on the wall as he walks through.
This method is guaranteed to find an exit if we start at the entrance to the maze; then this method allows us to explore a section of the maze and find our way out. However, it is not guaranteed to find an exit if we start in the middle of the maze: the robot could be going in circles around an “island” inside the maze.
The first draft of the program looks as follows (not including initialization and setup):
while True:
go_to_intersection()
check_intersection()
if there is a passage to the left, turn left
otherwise, if there is a passage forward, go forward
otherwise, turn right
Function go_to_intersection() should follow the line until we reach an intersection (that is, until the reflectance sensors at the front of the robot are above an intersection). This function is very similar to line follower algorithm from the previous project, with added checks: it should stop when reflectance sensor A1 (rightmost) or A8 (leftmost) sees white.
Function check_intersection() should do three things:
Slowly advance forward until the center (not front!) of the robot is above the intersection.
While doing this, keep checking whether there is a passage to the left and record it somehow; same for passage to the right
once we advanced so that the center of the robot is above the intersection, also check if there is a passage forward.
We can achieve this by asking the robot to start moving forward until we have travelled 5 cm; while doing this, we will be checking the line sensors. If the leftmost line sensor (number 6) sees white, it means that there is a passage to the left. To record it, we can create boolean variable path_left and set it to True once the sensor 6 sees white (Also, we should remember to set it to False initially):
def check_intersection():
# go forward while checking for intersection lines
bot.reset_encoders()
path_left = False
bot.set_motors(30,30) #start moving forward slowly
while bot.get_distance()<5:
if bot.sensor_on_white(6):
path_left = True
bot.stop_motors()
We should also add similar code for determining whether there is a path to the right (left to the reader as an exercise).
Next, once we advanced, we need to check if there is a passage ahead. This is easy using all_on_black() function (if there is no passage forward, all sensors will be on black).
Finally, we need somehow to return this information to whatever place in our program called this function. If we needed to return one value, we could just say return(path_left), but here we need to return 3 boolean values: path_left, path_forward, path_right. One way to do that is to put them in a list and return the list. This gives the following code:
def check_intersection():
# go forward while checking for intersection lines
bot.reset_encoders()
path_left = False
path_forward = False
path_right = False
bot.set_motors(30,30) #start moving forward slowly
while bot.get_distance()<5:
if bot.sensor_on_white(6):
path_left = True
....
bot.stop_motors()
if not bot.all_on_black():
path.forward = True
# now, let us return the found values
return([path_left, path_forward, path_right])
Now we can write the main program:
while True:
go_to_intersection()
paths = check_intersection()
if paths[0]:
# path to the left is open
bot.turn(-90)
elif paths[1]:
# path forward is open - do nothing, no need to turn
pass
elif paths[2]:
bot.turn(90)